
AGV小车按照AGV定位与导航方法不同的分类如下:
按照AGV定位与导航方法的不同,分为磁轨导航、二维码导航、激光SLAM导航等类型。
1.磁条导航方法是早期开始运用的AGV导航方法,一般与牵引式、担负式、潜伏式AGV结合运用,AGV通过识别在地面铺设的磁条来导航确认跋涉路线,是现在非常老练的导航方法,但是受磁轨的约束,灵活度较差。

2.二维码的导航方法是通过有距离的在地面张贴二维码,AGV跋涉时实时识别当前视觉识别到的二维码信息来确认位置与跋涉路线,一般与托举式AGV结合运用。由于在复杂的人机混用场景中二维码容易损坏,需求常常维护,现在仅在无人智能仓储中得到比较广泛运用。
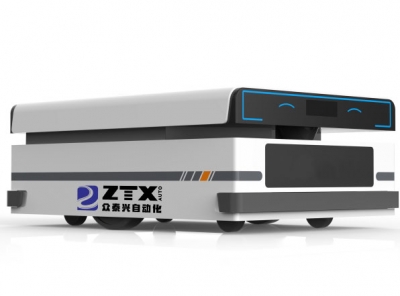
3.激光SLAM导航方法采用先进的SLAM机器人定位技能(实时定位与地图生成)完成AGV的途径地图,自主导航、自主定位,不需求任何辅佐定位设施,灵活性好,形式途径灵活多变,能够习惯多种现场环境,是现在受欢迎的导航方法。